
project
Research Projects
Wave observation and data analysis in the demonstration field (Naruseido)
Although it is essential to evaluate the effects of turbulence in tidal power generation, there has not been sufficient analysis of on-site data from wave observations.
Therefore, as part of the project to promote the practical application of tidal current power generation technology, we are conducting wave observations in Naruse-do, Goto, which is assumed to be the area where the device will be installed, in collaboration with the Nagasaki Marine Industry Cluster Formation Promotion Council, in order to ensure the quality and quantity of on-site observation data at the demonstration field.
Development of Cable-stayed Bridge Cable Inspection Robot
Robots for structural inspection are needed everywhere in the world.
In Japan in particular, the aging of bridges and other social infrastructure has become an issue, and maintenance has become mandatory by law.
Traditional manual inspections are dangerous and inefficient, and the development of robotic systems to replace them is desired.
This research aimed to develop a robot for social infrastructure inspection, and we collaborated with a company to develop a cable-stayed bridge cable inspection robot, for which there is a great need in society.
The world's first mechanism of a cable-mounted, multi-rotor flying robot was invented, and a camera built into the inside of the robot allows the robot to photograph cable damage and transmit images to the ground, making it possible to inspect cable-stayed bridge cables safely, reliably, quickly, and at low cost, even in strong winds. This has greatly improved the efficiency of inspection work. This greatly improves the efficiency of inspection work and enables cable-stayed bridge inspections nationwide to be carried out promptly.

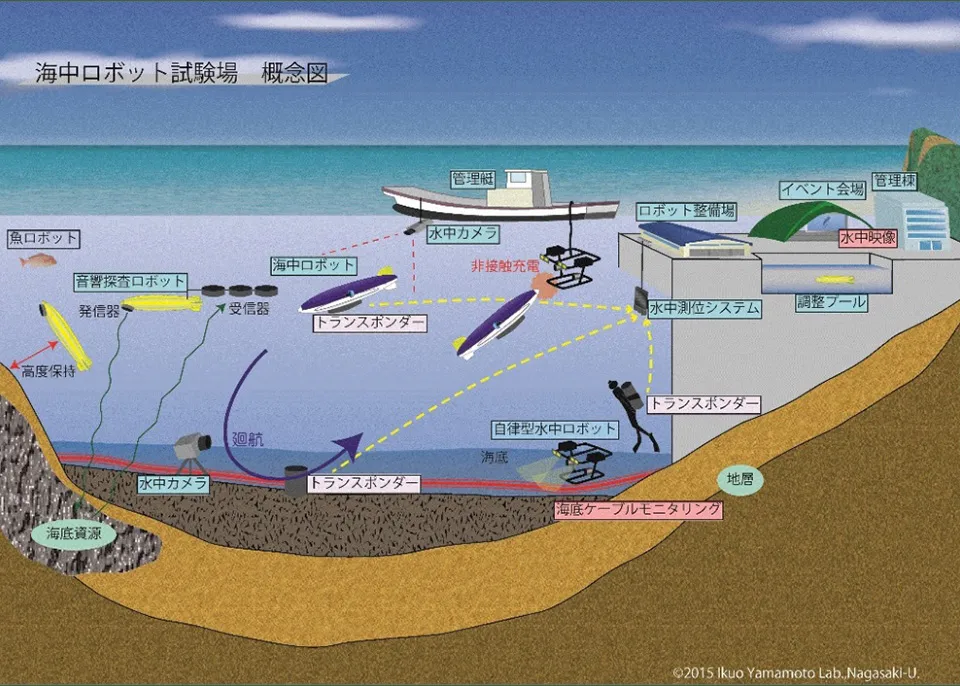
Non-contact transmission connectors used in underwater robots
Developing a system that allows underwater robots to recharge and transmit data underwater would be an innovative technology that would greatly improve operability.
This research, in collaboration with the Industrial Technology Center of Nagasaki Prefecture and others, is developing a lightweight non-contact transmission system mounted on an underwater robot that can achieve high-efficiency power transmission and high-speed data transfer by developing a non-contact power transfer technology that connects and fixes connectors on the power supply unit and the power receiving unit without metal contacts and an optical communication technology that is not affected by seawater. This is the development of a lightweight non-contact transmission system for underwater robots that can achieve high-efficiency power transmission and high-speed data transfer.
Furthermore, this technology can be used to develop a non-contact transmission system that enables stable charging and data transmission in waves by means of docking autonomous and remotely operated underwater robots underwater, and is expected to lead to more efficient equipment construction and maintenance inspections at sea underwater.
Study on Fishery Coordination Model Using Floating Offshore Wind Power Generation Facilities in FY 2008 (Nagasaki Prefecture)
The Center for Marine Energy and Fisheries Symbiosis and the Japan Sea Development Promotion Association have formed a joint project team to conduct joint research to understand the actual conditions of fish aggregation, distribution, migration, and spawning around a floating offshore wind power generation facility off Sakiyama, Goto City, and have begun on-site surveys using bio-logging methods and other techniques. We have begun on-site surveys using bio-logging and other methods.